
上海微系统所研制出触嗅一体智能仿生机械手,实现应急救援掩埋场景下人体识别救援
与应急管理部上海消防研究所合作,通过到一线消防救援单位实地调研,真实还原构建了人体被瓦砾石堆覆盖的掩埋场景,在此环境下对包括人体在内的11种典型物体进行识别,触嗅联觉识别准确率达96.9%,较单一感觉提升了15%。相较麻省理工学院发表于Nature(DOI:10.1038/s41586-019-1234-z)的单一触觉(548个传感器)感知研究,本工作通过触(70个)、嗅(6个)联觉,仅使用1/7数量的传感器,达到了更理想的识别目的。并且缩小后的传感器规模和样本量,更适合复杂环境、资源有限条件下的快速反应和应用。除此之外,面对在实际救援中经常遇见的存在干扰气体或器件部分损坏等情况,通过多模态感知的互补和神经网络的快速调节,该系统仍保持良好的准确率(>80%)。
相关研究成果以“A star-nose-like tactile-olfactory bionic sensing array for robust object recognition in non-visual environments”为题于2022年1月10日发表在国际重要学术期刊Nature Communications(Nat. Commun. 2022, 13, 79.)上。
该论文的通讯作者为上海微系统所陶虎研究员、第一通讯单位为中科院上海微系统所,合作单位有应急管理部上海消防研究所、中科院自动化所、苏州慧闻纳米科技有限公司。该工作得到科技创新2030-重大项目、国家重点研发计划、国家自然科学基金优秀青年基金、中国科学院基础前沿科学研究计划“从0到1”原始创新项目、上海市优秀学术带头人计划等相关研究计划的支持。
论文链接:https://www.nature.com/articles/s41467-021-27672-z。
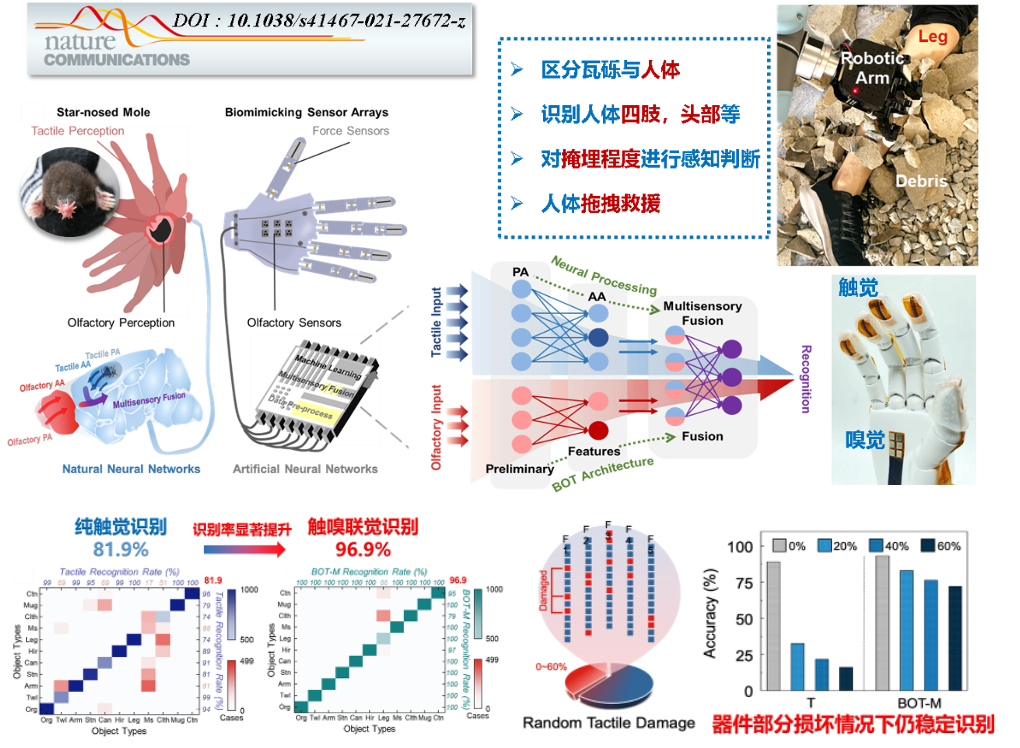
图1. 用于应急救援掩埋场景的触嗅一体仿生智能机械手

