
利用地面控制点进行指导的弱监督深度预测
Weakly Supervised Deep Depth Prediction Leveraging Ground Control Points for Guidance
利用地面控制点进行指导的弱监督深度预测
尽管在基于学习的深度预测方面取得了巨大的进展,但大多数方法严重依赖大量密集的真实深度数据进行训练。为了解决标记成本与精度之间的权衡问题,本文提出了一种新的弱监督方法,即通过引入稳健的地面控制点进行指导。通过利用来自地面控制点、视差边缘梯度和图像外观约束的指导,本文改进的具有可变形卷积层的网络可以更有效的方式学习图像信息。该方法在KITTI、Cityscapes和Make3D数据集上的实验表明,所提出的方法具有优于现有弱监督方法的性能,并达到与SOTA相当的结果。
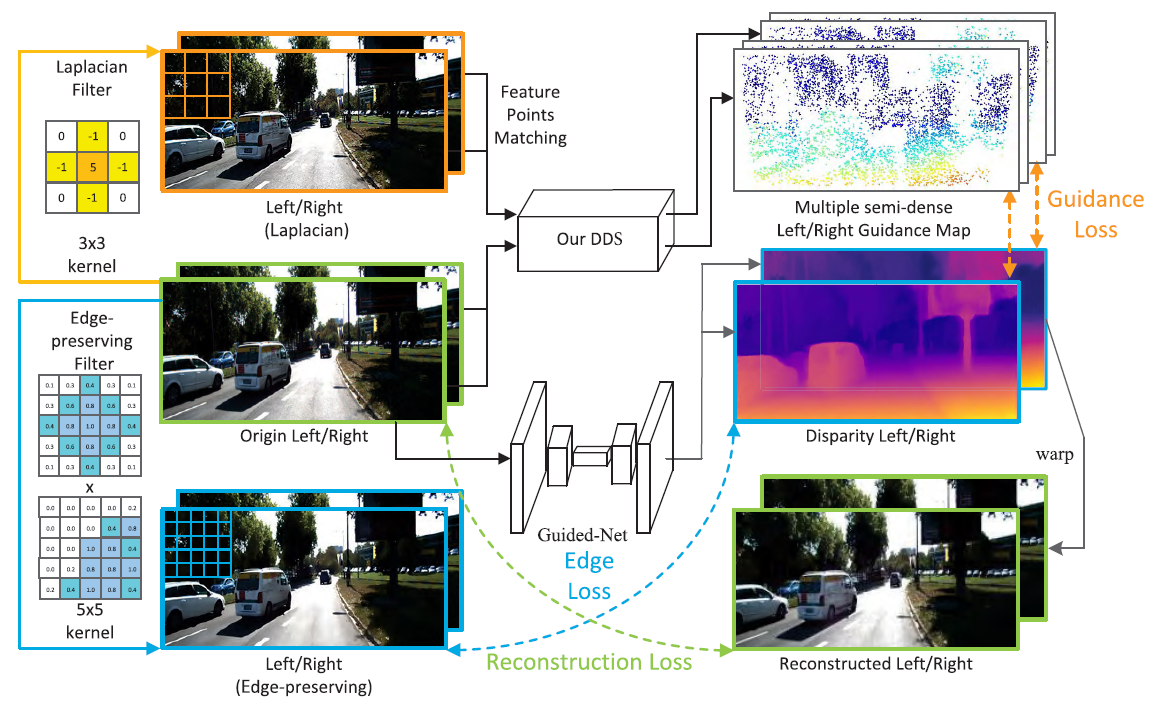
图1. 半稠密地面控制点指导下的深度预测框架。DDS滤波器过滤了不正确的匹配,并提供了基于多幅图像的多个半稠密制导图。训练损失由三项组成:由多幅半稠密制导图和视差图计算的制导损失,从边缘图像和视差图中计算出的边缘损失,以及从原始图像和重建图像中计算出的重建损失。
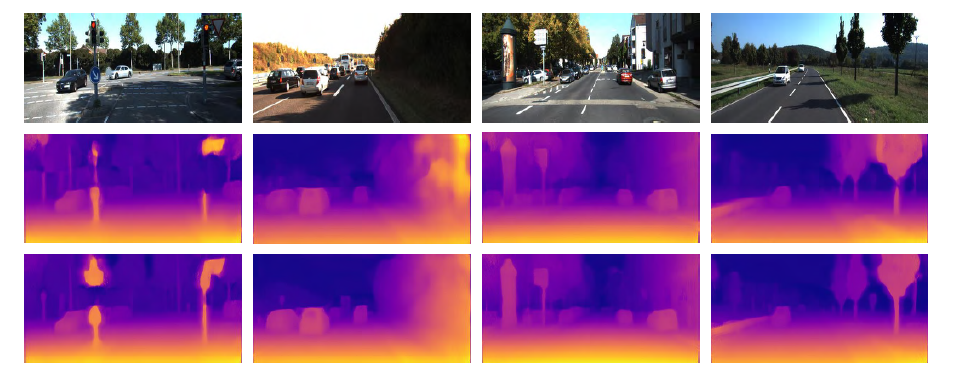
图2. 本文方法的定性结果和与现有技术弱监督方法的比较。第一行是来自KITTI数据集的左图像,第二行是现有弱监督方法的深度估计结果,最后一行是本文方法的结果。
本文链接:https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=8570753