
具有点线特征的双目视觉惯性SLAM
Stereo Visual-Inertial SLAM With Points and Lines
具有点线特征的双目视觉惯性SLAM
视觉-惯性SLAM系统实现了对摄像机运动和环境的三维表示的高度精确的估计。大多数现有方法依赖于特征匹配或使用光度一致性约束的直接图像配准来构建点云。当面对低纹理环境时,这些方法的性能通常会降低。本文提出了结合点和线特征的视觉-惯性SLAM系统的鲁棒性。该方法通过选择关键帧并处理异常值的方法,以一种有效的方式组合了点、线特征和IMU测量值。文中代价函数由点差、线重投影误差和IMU残差构成,并导出了线重投影误差的雅可比矩阵与线段的三维端点和摄像机运动的关系。环路闭环检测是由点和线特征决定的,使用的方法是词袋法。该方法在EuRoc数据集上进行了评估,并与最先进的视觉-惯性聚变方法进行了比较。实验结果表明,该方法对大多数测试序列具有较高的精度,特别是在低纹理和光照变化等具有挑战性的情况下。
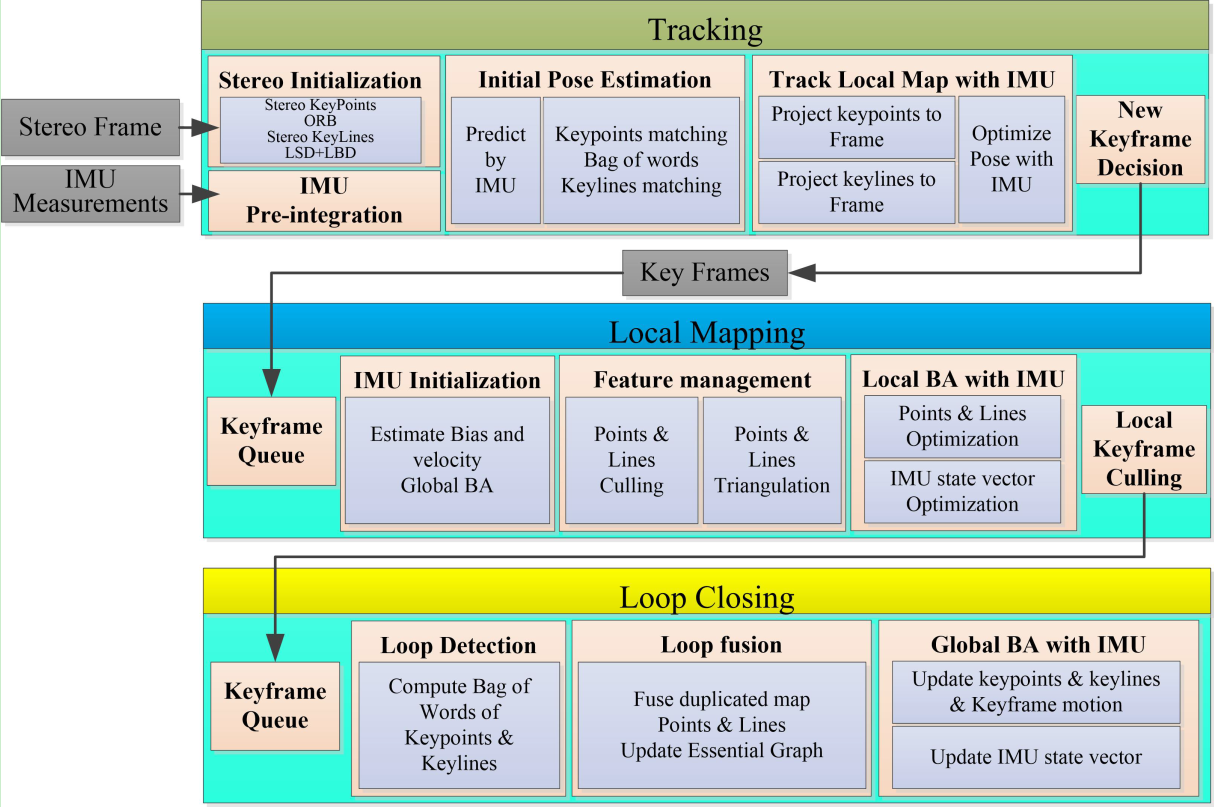
图1. SVIPL-SLAM系统示意图 展示了三个线程执行的步骤:跟踪、局部建图和循环闭环。系统的输入是经整流的双目帧和同步的IMU测量值。
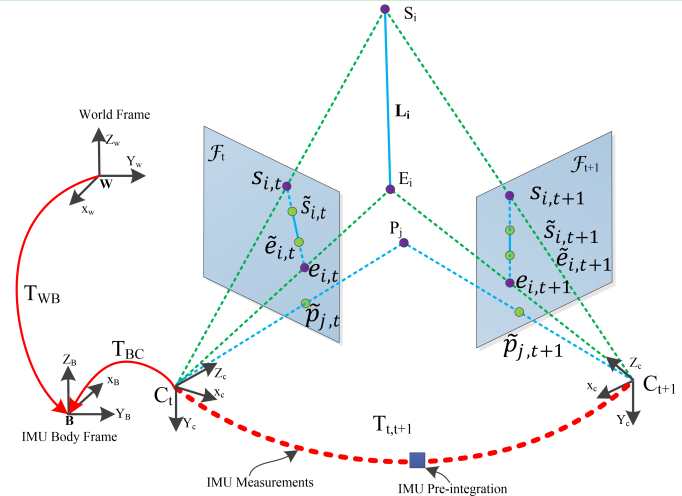
图2. 不同坐标的转换和线段和点的重新投影演示。
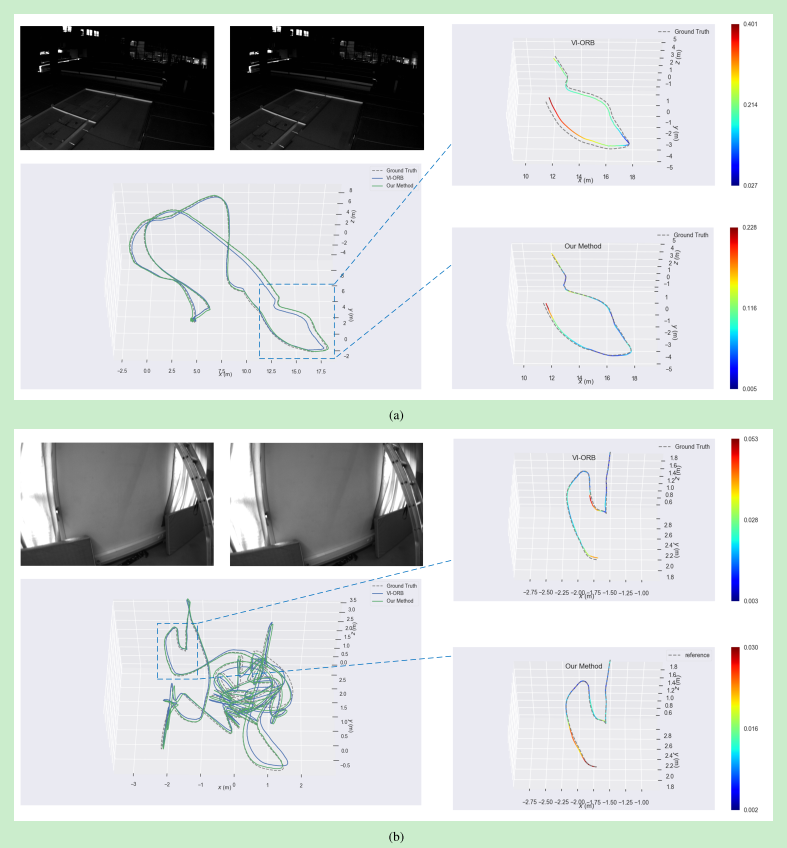
图3. 对光照变化和低纹理情况下的性能进行了比较。(A)光照条件很低,该方法的平移率为0.068654m,另一个为0.146619m。(B)呈现低织构环境,rmse由0.042140m降至0.014937m。
本文链接:https://ieeexplore.ieee.org/abstract/document/8533332