
基于相关滤波器的尺度自适应实时视觉跟踪
Robust Scale Adaptive and Real-Time Visual Tracking with Correlation Filters
基于相关滤波器的尺度自适应实时视觉跟踪
尽管视觉跟踪已经研究了数十年,但由于其在许多应用中有着关键作用,使得大家一直对其有极大的关注。近年来,人们对视觉跟踪系统中相关滤波器的使用越来越感兴趣,因为它们在不同的比赛和基准测试中取得了非常引人注目的结果。
然而,仍然需要改进整体跟踪能力以对抗各种跟踪问题,包括大尺度变换,遮挡和形变。本文提出了一种具有鲁棒尺度估计的跟踪器,它可以在不明显降低速度的条件下,解决核化相关滤波器(KCF)跟踪器中固定模板大小的问题。在基于KCF跟踪器找到最优转换之后,我们判别相关滤波器来进行独立的尺度估计。与详尽的尺度空间搜索方案相比,我们的方法改进了性能,同时具有计算效率。为了展示我们的方法的有效性,我们使用带有11个属性注释的基准序列来评估跟踪器处理不同属性的程度。实验表明,所提出的算法相比于目前几种最先进的算法,表现更为出色。在所有51个基准序列中也取得了具有准确性和鲁棒性的的结果,这证明了我们的跟踪器的有效性。
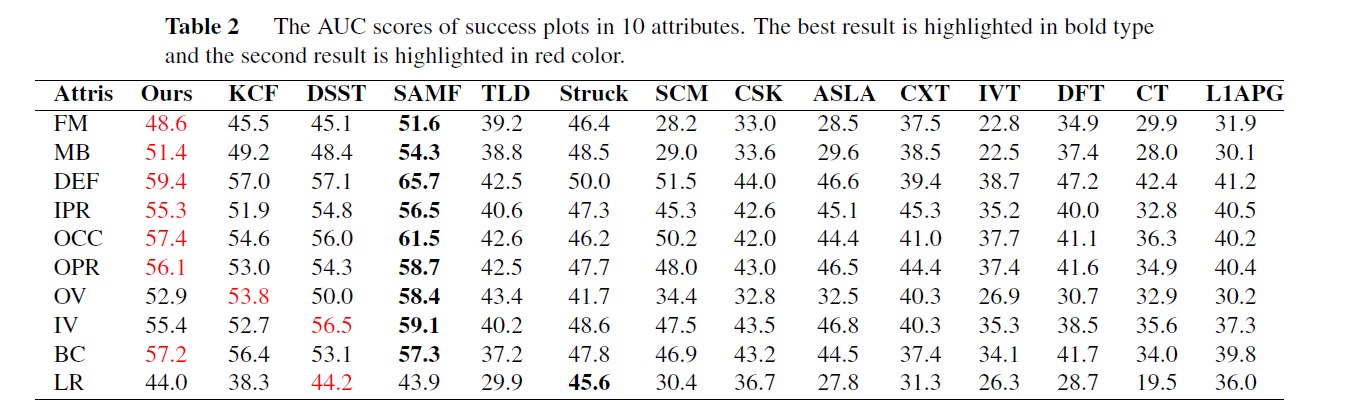
表1 10个成功标注的AUC分数。最好的结果用粗体显示,第二的结果用红色标注。
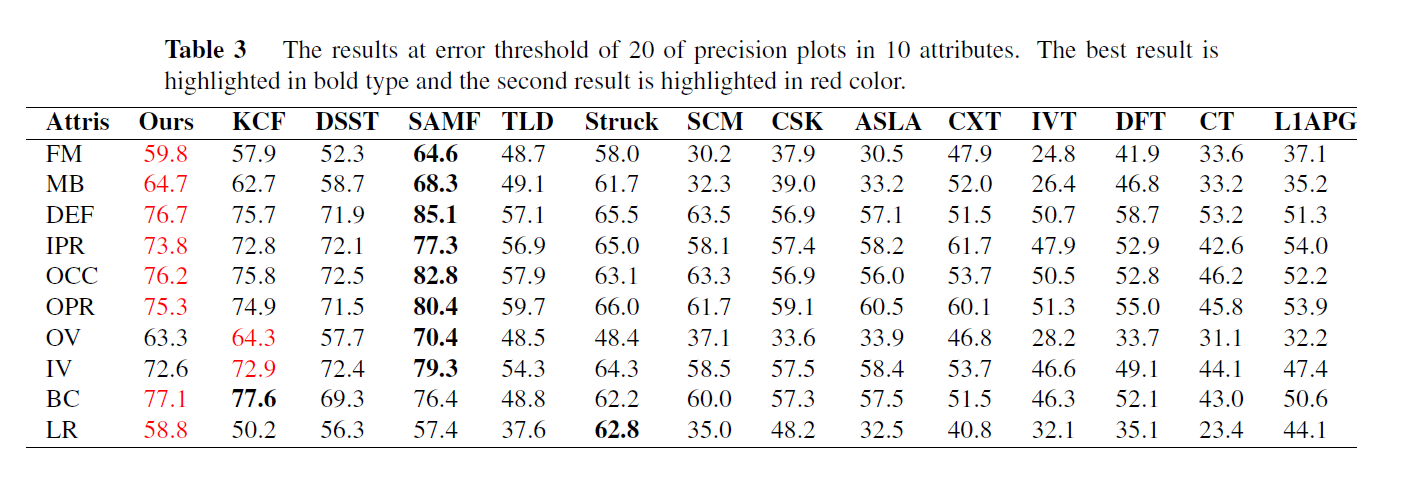
表2 10个属性中精度图的误差阈值为20的结果。最好的结果用粗体显示,第二的结果用红色标注。
本文链接:
https://search.ieice.org/bin/summary.php?id=e99-d_7_1895