
基于压缩感知和块匹配的鲁棒目标跟踪
Robust Object Tracking with Compressive Sensing and Patches Matching
基于压缩感知和块匹配的鲁棒目标跟踪
目标跟踪是计算机视觉中的基础问题之一。如何提高复杂环境中的跟踪效果仍有必要继续研究。本文提出了一个分块协同压缩追踪(Patches-collaborative compressive tracking)的算法。实验表明,对于复杂有挑战的测试序列,与目前较先进的算法相比,本文提出的方法取得了较好的效果。
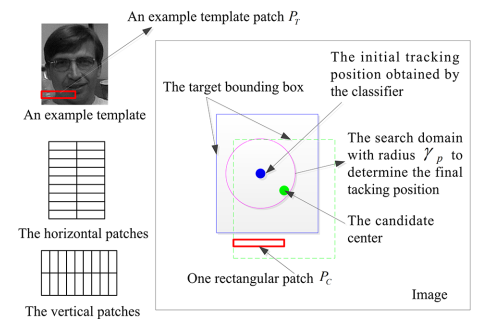
图1. 垂直和水平块的示意图 实线所示的边界框是由分类器获得的初始跟踪目标;虚线所示的边界框是候选跟踪目标。

图2. 跟踪结果图 (a) david2序列 (b) dudek序列 (c) tiger2序列

图3. 跟踪结果图 (a) boy序列 (b) jump序列 (c) david3序列 (d) lem序列
本文链接:
https://www.jstage.jst.go.jp/article/transinf/E99.D/6/E99.D_2015EDL8235/_article/-char/en